

MS-8126 high-performance inertial / satellite combination navigation system
关键词:
Category:
key word: MS-8126 high-performance inertial / satellite combination navigation system
E-mail:
Details
1. Product profile
The MS-8126 is a high-performance inertial / satellite combination navigation system. Built-in three-axis high-precision fiber gyro, three-axis high-precision accelerometer, high-precision barometer, a BD / GPS / GLONASS / GALILEO full frequency receiver. It can measure the speed, position and attitude of the carrier, as well as the angular rate, acceleration, air pressure, temperature and other information after the output compensation.

2. Characteristic:
1. The product supports two working modes of compass and inertial navigation, which users can configure by themselves;
2. The compass mode works independently without the assistance of external information;
3. Support static alignment, shaking condition alignment, and dynamic alignment assisted by external information (GPS, wheel speed, DVL);
4. Support -40 ℃ to 60 ℃ wide temperature range;
5,1 KHz high sampling rate, 1 KHz compensation operation, 1 KHz navigation operation, 5Hz Kalman filter;
6, deep ploughing car navigation scene, can be external odometer, do combined navigation;
7, UAV application support GNSS lock loss, the sky speed does not diverge;
8. Support no delay lifting measurement algorithm.
9. With its own data storage function, it can simultaneously store the receiver original data, the IMU raw data and the base station difference data, conduct post-processing of IE, and can also store navigation data and external information;
3. Precision index:
3.1 Accuracy index of inertial device:
Gyroscope | |
Range | ±500°/s |
Zero bias stability | For static test at room temperature, mean data was recorded with standard deviation of 0.01° / h |
Zero bias repeatability | For static test at room temperature, repeatedly measuring gyro zero bias data with standard deviation of 0.01° / h |
Bandwidth | 100Hz (Customizable) |
Accelerometer | |
Range | ±8g |
Zero bias stability | For static test at room temperature, record the accelerometer second mean data with standard deviation of 10 ug |
Zero bias repeatability | Static test at room temperature, repeated measuring accelerometer zero bias data, standard deviation of 10 ug |
Bandwidth | 100Hz (Customizable) |
3.2 Performance indicators of GNSS receiver:
channel | 1408 channel |
frequency point | BDS B1I、 B2I、 B3I、 B1C、 B2a; GPS L1C/A、 L1C、 L2P (W)、 L2C、 L5; GLONASS L1、 L2;Galileo E1、 E5a、 E5b; QZSS L1, L2, L5 |
Single Point Location (RMS) | Level: 1.5m; elevation: 3.0m |
DGPS(RMS) | Plane: 0.4m; elevation: 0.8m |
RTK(RMS) | Level: 1cm + 1ppm; elevation: 1.5cm + 1ppm |
Directional precision (RMS) | 0.2 degrees / 1m baseline |
Time accuracy (RMS) | 20ns |
Speed accuracy (RMS) | 0.03m/s |
cold boot | <20 Seconds |
Differential data | RTCM 2.X/3.X CMR |
Data update rate | 20Hz |
3.3 Combined navigation performance indicators:
positional accuracy | 1.5m (CEP single-point mode), 0.01m + 1ppm (CEP RTK mode) |
Speed accuracy | 0.01m/s |
pitch | 0.01° (RMS, dynamic), 0.005° (RMS, static) |
roll | 0.01° (RMS, dynamic), 0.005° (RMS, static) |
yaw | 0.015° (RMS, dynamic) |
The gyroscope finds its north | Power on for 10 minutes, and the heading error is less than 0.03 degrees |
3.4 Other parameters:
working voltage | 10V~28V DC |
Power ripple | <50mV |
maximum power dissipation | The power consumption of the normal temperature system is 12W, the maximum power consumption of high and low temperature is 15W, and the starting power is 30W |
working temperature | -40℃~+60℃ |
storage temperature | -50~+100℃ |
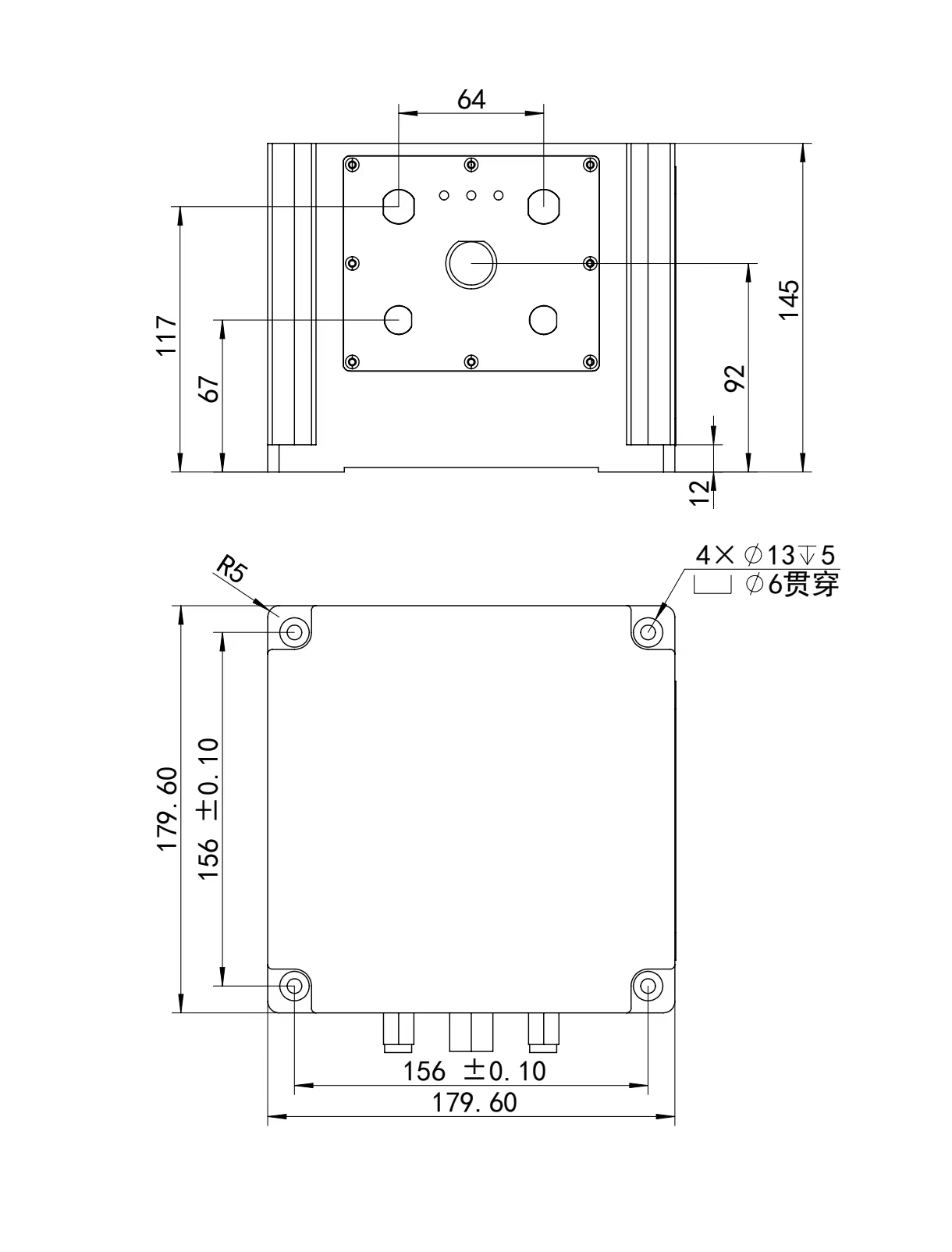
outline dimension | 179.6mm X 179.6mm X 145.0mm |
weight | ≤7000g |
4. External interface:
4.1 The main connector is Y 50 EX-1222 ZJ 14, and the user end is Y 50 EX-1222 TK 2.
PIN NUM | Net Name | explain |
1 | POWER_IN | 10V~28V power supply |
2 | GND | |
3 | RS232_RXD1 | INS COM1 Channel, combined navigation output, protocol configurable, maximum baud rate of 230400bps, also used to upgrade the navigation program, modify the protocol, etc. |
4 | RS232_TXD1 | |
5 | GND | |
6 | RS422_A | INS COM2 Channel, combined navigation output, protocol configurable, the maximum baud rate of 921,600 bps, is also used to upgrade the navigation program, modify the protocol, etc. |
7 | RS422_B | |
8 | RS422_Z | |
9 | RS422_Y | |
10 | CAN_H | The combination navigation output can be customized according to the requirements, and the highest baud rate is 1Mbps. |
11 | CAN_L | |
12 | RS232_RXD2 | GPS card output of COM1, independent communication port, the user can freely configure. Differential information input port. Delivery protocol: GPGGA 1; receiving protocol: RTCMV3.2; |
13 | RS232_TXD2 | |
14 | GND | |
15 | RS232_RXD3 | CPU2 COM1 Channel, which can output navigation data and store external data. The highest port rate is 230400bps, also used to upgrade the CPU2 program. Where PIN15 PIN16 can also be modified to INS COM1 RS422 external output by jumper. |
16 | RS232_TXD3 | |
17 | GND | |
18 | INPUT | Universal IO port, 3.3V LVTTL, where the INPUT can be used as a pulse wheel speed input |
19 | OUTPUT | |
20 | PPS+ | Differential PPS signal, LVTTL-3.3V, users can only choose one of them for use on the ground. Frequency and pulse width can be configured. |
21 | PPS- | |
22 | GND |
4.2 The secondary connector is M12-17 A, with point definition as follows:
PIN NUM | Net Name | explain |
1 | POWER_IN | 10V~28V power supply, the main and auxiliary connectors can simultaneously supply power to the product, and the actual voltage is higher. |
2 | GND | |
3 | RS232_RXD1 | CPU2 COM1 Channel, which can output navigation data and store external data. The highest port rate is 230400bps, also used to upgrade the CPU2 program.
|
4 | RS232_TXD1 | |
5 | GND | |
6 | RS422_A1 | CPU2 COM2 Channel, which can output navigation data and store external data. The highest port rate is 921,600 bps, which is also used to upgrade the CPU2 program.
|
7 | RS422_B1 | |
8 | RS422_Z1 | |
9 | RS422_Y1 | |
10 | RS422_Z2 | CPU2 COM3 Channel, you can output the navigation data. The highest port rate is 921,600 bps. It can also be modified to the external output. |
11 | RS422_Y2 | |
12 | GND | |
13 | RS422_Z2 | CPU2 COM4 Channel, you can output the navigation data. The highest port rate is 921,600 bps. It can also be modified to the external output. |
14 | RS422_Y2 | |
15 | GND | |
16 | PPS+ | Differential PPS signal, LVTTL-3.3V, the user can select only one of them to use. Frequency and pulse width are configurable. |
17 | PPS- |
5. Overall Dimensions:
Inquiry
Recommended products




Contact Us
Address:
No.18 Gaolang East Road, Xinwu District, Wuxi City, China

Quick Navigation
Online Message
Wuxi Lins Tech Co.,Ltd.
If you have any product related questions, please feel free to contact us!
Copyright©2025 Wuxi Lins Tech Co.,Ltd.