
Application and industry breakthrough of Inertial Measurement Unit (IMU) and combined navigation in UAV
Release time:
2025-05-26
I. Technical cornerstone: the core value of GNSS/INS combined navigation
Inertial Navigation System (INS) acquires real-time acceleration and angular velocity through the Inertial Measurement Unit (IMU). As the core sensor of drones, IMU senses the aircraft's acceleration, angular velocity, and magnetic field information in real time using a triaxial accelerometer, gyroscope, and magnetometer, providing fundamental data for flight control. However, it suffers from cumulative errors over time. Global Navigation Satellite System (GNSS) offers centimeter-level absolute positioning accuracy but is susceptible to signal blockage and electromagnetic interference, making it difficult to achieve high-frequency autonomous navigation. By deeply integrating algorithms such as Kalman filtering, these two systems complement each other: GNSS periodically corrects INS drift, while INS maintains short-term high-precision positioning when GNSS fails, ensuring that drones can maintain stable flight paths even in complex environments. The integration of GNSS and INS forms the golden combination for drone navigation, providing reliable "all-weather, all-scenario" navigation capabilities. This technology not only addresses the limitations of single sensors but also endows drones with autonomous decision-making abilities in complex environments.
2. Different application scenarios of fixed-wing and rotary-wing UAVs
1. Fixed-wing drones: the precise wings for long-endurance missions
2. Fixed-wing drones, with their efficient aerodynamic design, are widely used for long-distance tasks such as surveying and inspection. Their navigation systems typically rely on GNSS, combined with IMU for dynamic attitude correction. For example, high-altitude long-endurance drones use aerodynamic models to assist inertial navigation, maintaining high-precision positioning even in GNSS-denied environments, with errors controlled at the centimeter level. In these applications, the low drift characteristics of IMU (such as gyroscope bias instability <0.3 °/h) are crucial, ensuring minimal cumulative error over extended flight times.
3. Rotorcraft: The stable foundation for flexible operations
4. The hover and agile maneuvering capabilities of rotary-wing drones rely on real-time attitude feedback from the IMU. Taking the DJI N3 flight control as an example, its dual IMU redundancy design combined with online fault detection algorithms can achieve real-time data backup, significantly enhancing reliability in complex environments. In logistics delivery scenarios, rotary-wing drones can achieve centimeter-level obstacle avoidance and precise landing between city buildings through the integration of IMU and visual sensors.
3. Product advantages: redefine the performance boundary of navigation system
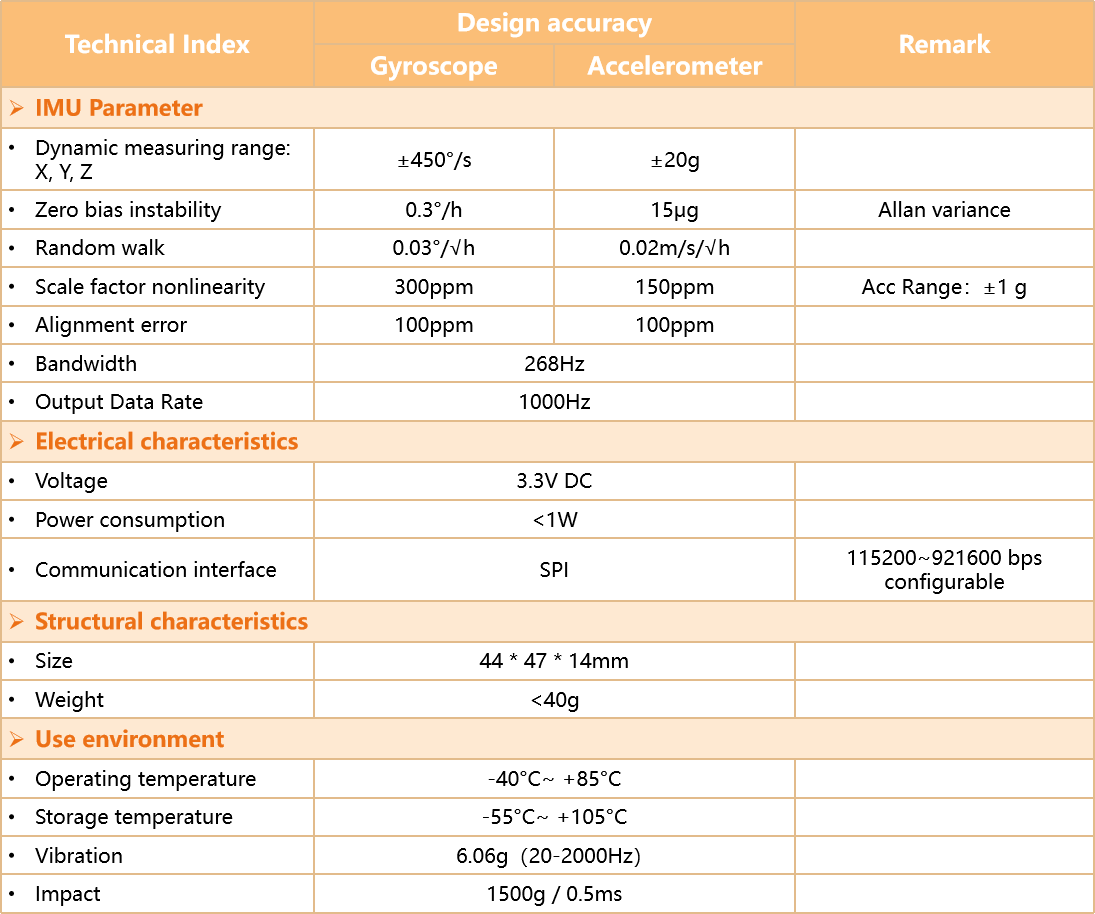
1. The high precision and low miniaturization of IMU are perfectly balanced
2. Our LINS-688 series IMU adopts the 3D stacked MEMS process, with a volume of only 44x47x14mm, weight of 40g and power consumption of less than 0.8W. Among them, the highest model in the LINS-688 series has a gyroscope bias instability <0.2°/h and an accelerometer bias instability <10μg, which far exceeds the industry average level.
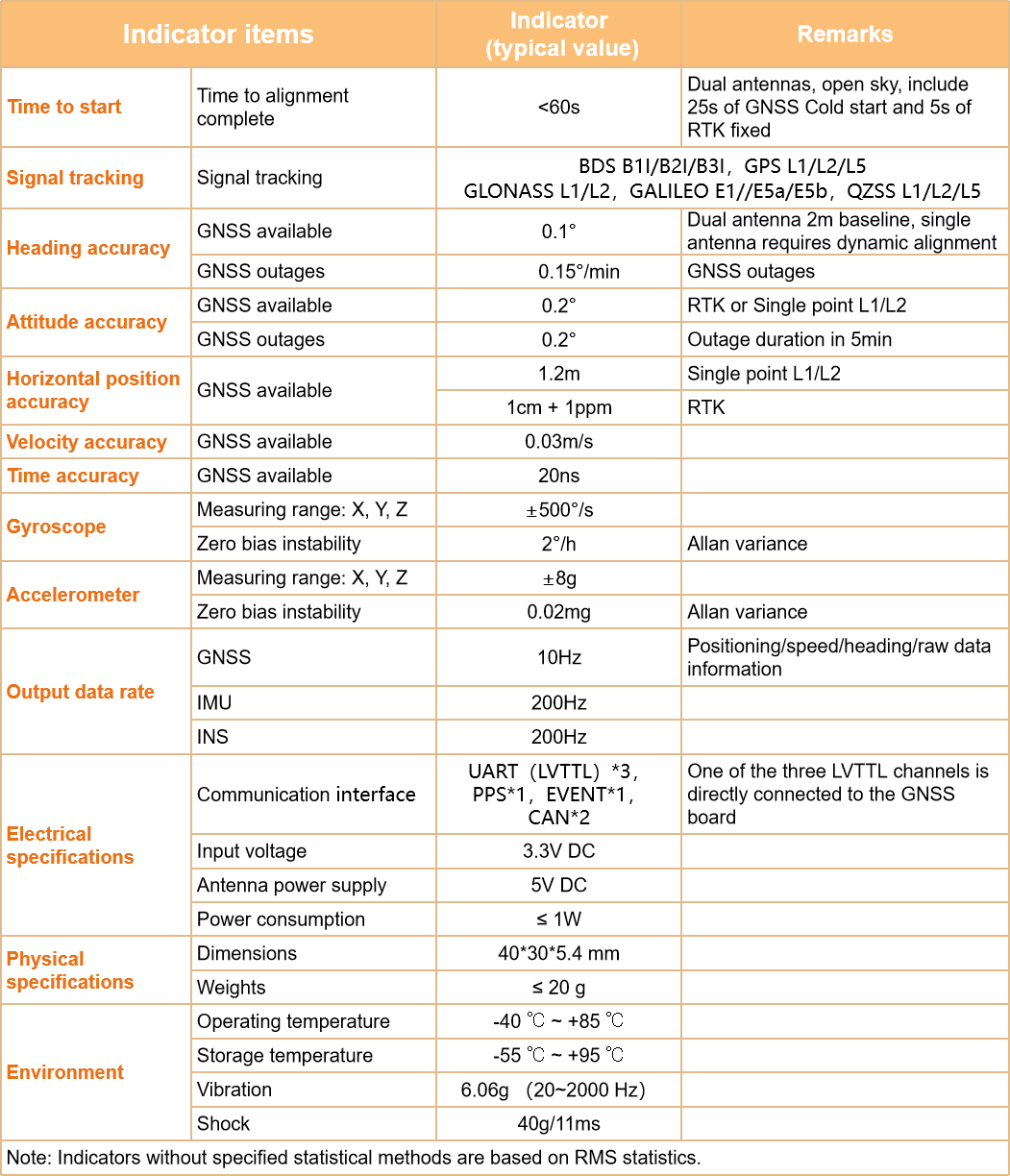
3. Ultra-small high precision combined navigation
4. Our MM-6300 series integrated navigation system features a highly integrated design, achieving high-precision GNSS and IMU fusion on a BGA packaged module. It measures only 40*30mm and weighs less than 20g, providing users with centimeter-level RTK positioning information and attitude and heading data better than 0.1°. Additionally, it offers a rich set of interfaces, including pre-installed RF interfaces, facilitating quick layout within the flight control board. This system overcomes the limitations of traditional high-precision integrated navigation systems, such as large size, high power consumption, and complex integration.

Company News
Contact Us
Address:
No.18 Gaolang East Road, Xinwu District, Wuxi City, China

Quick Navigation
Online Message
Wuxi Lins Tech Co.,Ltd.
If you have any product related questions, please feel free to contact us!
Copyright©2025 Wuxi Lins Tech Co.,Ltd.